��������ϵͳ
��һ�� �� ��
���������dz������복�ֻ���֮�䴫������װ�õ��ܳơ���������Ҫ�������������棺
��1������̥��ͬ���ã�������������Գ��ֵ���ʹ����ƽ����ʻ��
��2����������·��֮����������������ƶ����������ش��ݵ�������
��3��������֧����ǰ�����ϣ������ֳ����복��֮��ļ��ι�ϵ��
��ͳ������ϵͳ��Ҫ�ɵ��ɡ����������ȶ��˵���ɡ���������ʹ·��������ͳ��ְڶ�����ֱ�Ӵ�������������Ҳ�����������̥�ŵ���������������Ѹ��˥�����ɵ���ʹ�������ʣ����ܸ��������ķ����ȶ��ԡ����ǵ��ɺͼ��������ۺ����ԣ�ȷ������������ʻ���ܺͲ������ܡ�����ͳ�Ļ�е������ն��Dz��ܱ仯�ģ���ʹ�DZ�նȵ��ɣ���仯��ΧҲʮ�����ޣ���ͳ�ļ������������ͬ�����ܱ仯����ˣ�����Щ��ͳԪ����ɵ����ܲ�����ͬʱ�������õij��������Ժ����õIJ����ȶ��ԡ����磬Ϊ������������������ԣ�Ҫ���������ñȽ����������������ڲ�ƽ·������ʻʱ�����нϴ���˶��ռ䡣���⽫������������ʻ�����У�����·��ĵ�����ʹ����λ����������λ�Ƶ�������������ʻ���ȶ��Դ���ʮ�ֲ���Ӱ�졣��֮��Ϊ����������ݵ��ȶ��ԣ�Ҫ������Ҫ�нϴ�ĵ��ɸնȺͽϴ�ļ������������ᣬ�����Ƴ���������˶��������ֻᵼ�³��������ϴ�������Ӷ�Ӱ�������ij��������Ժͳ�����ʻ��ƽ˳�ԡ�
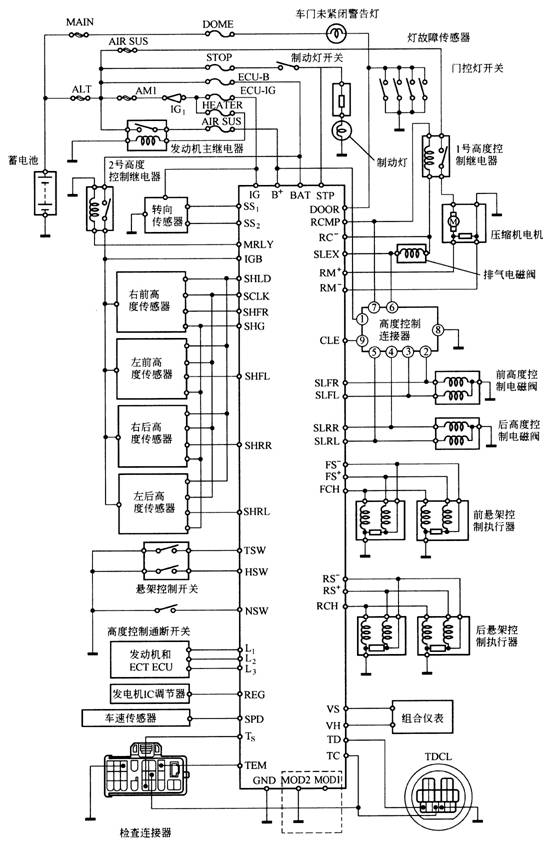
��ˣ���ͳ����������ƹ����в��ɱ����Ҫ�����ڳ��������ԺͲ����ȶ�����Ѱ����Э�����ܽ�������ͳ�����ڽṹ�ϵIJ��ϸ��º����ƣ������Ż���Ʒ���������ƣ���ʹ�������ر��ǽγ��ij��������ԺͲ����ȶ������˺ܴ���ߣ�����ͳ������Ȼ�ܵ��������ơ���������Ƶ����ܲ��������ɸնȺͼ�������������ȣ��Dz��ɵ��ڵģ�ʹ�ô�ͳ����ֻ�ܱ�֤������һ���ض��ĵ�·���ٶ������´ﵽ�������ŵ�ƥ�䣬����ֻ�ܱ����س��ܵ���Գ������������������ܸ��ݵ�·�����ٵIJ�ͬ���ı����ܲ����������������ؿ��Ƶ���Գ�������������ͼ10-1Ϊ��ͳ��������������ʾ��ͼ��
|
|
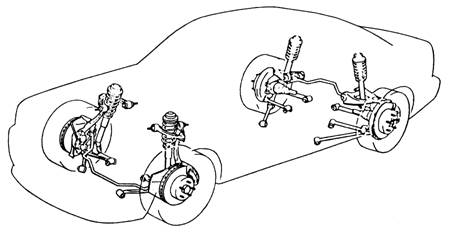
ͼ10-1 ��ͳ��������������
���Ÿ��ٹ�·�ķ�չ�������ٶ����˺ܴ���ߣ�������������Ҳ����˸��ߵ�Ҫ����ͳ�������������������ܵĽ�һ����ߡ�������Ϊ�����ĵ��Ӽ����������������ķ��ٷ�չ�������豸���ܵĴ�����ƺͿɿ��ԵIJ�����ߣ��ٳ�����������װ�õĸ߿ɿ��ԡ��ͳɱ��Ϳռ��ʡ��ʹ���ӿ��Ƽ������㷺��Ӧ���ڰ����������ڵ������ĸ������֡�ͨ�����õ��Ӽ���ʵ���������ܵĿ��ƣ�����ʹ���������������Դﵽ��������ij̶ȣ�����ʹ�����IJ����ȶ��Դﵽ���״̬�������������Dz��Ͽ�����Ӧ������ʻ�������������ܿ���ϵͳ���ڽγ��������Ǻ����ߵ��γ��У���̳��������ܸ�����Խ�ĸ��ֵ��ӿ�������ϵͳ��
����ĵ��ӿ�������ϵͳ��TEMS���������е�һ�֡���һϵͳ��������1984��ļ��ȴCRESSIDA�������ϣ���ֻ�Լ������ļ���������п��ơ�80���ĩ��չΪ���ӿ��ƿ�������ϵͳ��Ӧ���ں����γ���־LS400����һϵͳ�����Ƽ������ļ��������⣬���ɿ��ƿ������ɵĸնȼ����������̣��ĸ߶ȡ�ͼ10-2Ϊ��־LS400�ĵ��ӿ��ƿ�������ϵͳʾ��ͼ��
|
|
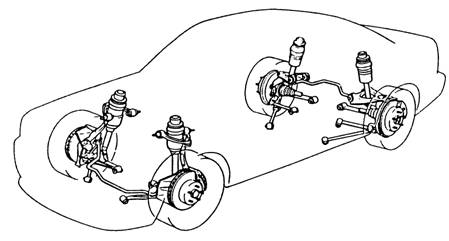
ͼ10-2 ���ӿ��ƿ�������
������Ҫ������־LS400�ĵ��ӿ��ƿ�������ϵͳ��
��־LS400��1989��12������������ΪucFl0��ֱ��1994��9�£�����ӿ��ƿ�������ϵͳ��δ�д�ĸĶ�����1994��10���𣬳���ΪucF20������ӿ��ƿ�������ϵͳҲ���˽ϴ�Ľ���
�ڶ��� ϵͳ�Ĺ���
�����������ܶ��ԣ������ܸնȼ��٣������ܵ�ƽ˳�Ժã�������������������ߣ������͵����ܸնȻ������������ʻ�����в�����ں���ҡ���ƻ�����������ʻ״̬��ʹ������ʻ�ȶ��Խ��͡����ң���ֻ�������ܸնȶ����ı�������ļ������ᣬ����������ͨ����������������������������������Ҳ�ᱻ�ƻ�����ˣ����ܸնȿ���������복���߶ȿ��ƺͼ������ļ�����������������ã�������Ч�ظ��������ij��������Ժ���ʻ�ȶ��ԡ�
����ĵ��ӿ��ƿ�������ϵͳ��һ����ͬʱ���Ƶ��ɸնȡ���������������ͳ����߶ȵ�ϵͳ����һϵͳ��ͬʱʹ���������������Ժ���ʻ�ȶ����ڸ��ֲ�ͬ�Ĺ����¾��ܴ������ߡ�
���ӿ��ƿ�������ϵͳ�Ĺ������£�
��1��ģʽ�仯��
��־LS400�ĵ��ӿ��ƿ�������ϵͳ�ṩ�����ܿ��ƿ��أ�����ʻԱ����ѡ�����ܿ�����LRC����־�������ƣ����غ߶ȿ��ƿ�����ɣ���ͼ10-3��ʾ��
|
|

ͼ10-3 ���ܿ���
LRC����������λ�ã�NORM�����棩��SPORT���˶�����NORMģʽ�����ڳ��������ԣ�ͨ������һ�����ʻ��SPORTģʽ���������ת�������µij����ȶ��ԡ�
�߶ȿ��ƿ���Ҳ������λ�ã�NORM�����棩��HIGH����λ����NORMλ����һ���·����ʻʱѡ�ã�HIGHλ�����ڲ�ƽ��·����ʻʱѡ�á�
��2�����ɸնȺͼ���������ơ�
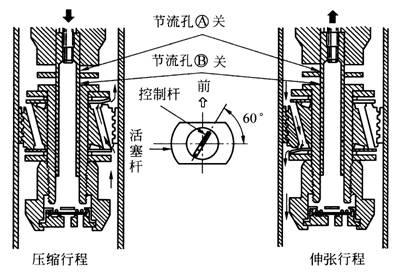
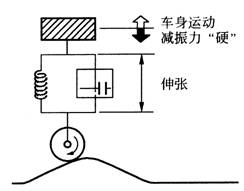
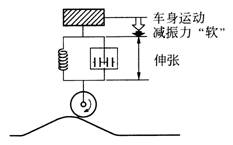
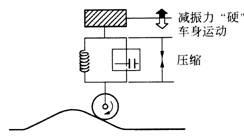
���ɸնȺͼ������������������ɵ���װ�ÿ��ơ����ɸն��С������͡�Ӳ������ģʽ�������������������С����������С��͡�Ӳ������ģʽ������װ�ø��ݳ��ٺ�·��ı仯�Զ��ص������ܸնȺͼ������ᣬ���ֿ��Ʒ�ʽ�������֣��߳��ٿ��ơ���ƽ��·���ơ��߶�������������������⣬�ڳ��ٻ�ת��仯ʱ������ɳ�����̬�ļ���仯�����ƻ����������������ԣ�������ʹ����ʧȥ�����ȶ��ԡ����ԣ�����Գ�����̬ʵʩ���ơ����ֿ��Ʒ�ʽ�������֣�ת��ʱ�ij���������ơ��ƶ�ʱ�ij������㡱ͷ��������ͻȻ����ʱ�ij����������ơ�
ÿ����ƵĹ��ܼ���10-1��
��10-1 ���ӿ��ƿ�������ϵͳ�Ĺ���
|
������Ŀ |
���� |
|
|
��������� |
|
ʹ���ɸնȺͼ��������ɡ�Ӳ��״̬��������������Ʋ��㣬ʹ���������Ʊ仯������С���Ը��Ʋ����� |
|
�����㡱ͷ���� |
|
ʹ���ɸնȺͼ��������ɡ�Ӳ��״̬��������������������ƶ����㡱ͷ��ʹ���������Ʊ仯������С |
|
���������� |
|
ʹ���ɸնȺͼ��������ɡ�Ӳ��״̬�����������������������ʱ������ʹ���������Ʊ仯������С |
|
�߳��ٿ��� |
|
ʹ���ɸնȱ�ɡ�Ӳ��״̬��ʹ���������ɡ��С�״̬����������ܸ�������������ʻʱ���ȶ��ԺͲ����� |
|
��ƽ�� ��·���� |
|
ʹ���ɸնȺͼ�����������Ҫ��ɡ��С�������״̬�����������������������������������������ڲ�ƽ̹��·����ʻʱ�ij��������� |
|
�߶����� |
|
ʹ���ɸնȺͼ��������ɡ��С�������״̬���������������ڲ�ƽ̹��·����ʻʱ�ĵ߶� |
|
������� |
|
ʹ���ɸնȺͼ��������ɡ��С�������״̬��������������������ڲ�ƽ̹��·����ʻʱ���������� |
|
·���Ӧ* ���������� |
|
��Ӧ�ڲ�ͬ�ĵ�·���ṩ���ֶ����ļ���������ѿ��ơ���Ӧ�أ��������ڸ��ֲ�ͬ�ĵ�·����ʻ״���±��ֺ㶨��̬ |







*������ucF20����
��3�����������̣��߶ȿ��ơ�
���ݸ߶ȿ��ƿ�����ѡȡ��ģʽ�Լ�����������״̬������װ���Զ����������ij����߶ȣ�ʹ�������������ȶ���״̬�����ֿ��Ʒ�ʽ�����֣��Զ��߶ȿ��ơ��߳��ٿ��ƺ͵�عضϿ��ơ�
ÿ����ƵĹ������ڱ�10-2��
��10-2 �����߶ȿ��ƵĹ���
|
������Ŀ |
���� |
|
|
�Զ��߶ȿ��� |
|
���ܳ�Ա���������������Σ�ʹ�����߶ȱ�����ijһ���㶨�ĸ߶�λ�á������߶ȿ��ƿ�����ʹ������Ŀ��߶ȱ�Ϊ���������ߡ���״̬ |
|
�߳��ٿ��� |
|
���߶ȿ��ƿ����ڡ�hight���ߣ���λ��ʱ�������߶Ȼή�͵���������״̬������Ƹ�����ʻʱ�Ŀ�������ѧ���ȶ��� |
|
��عض�* ���� |
|
�����ͷ�ضϺ����Ա���������������仯��ʹ�����߶ȱ�Ϊ����Ŀ��߶�ʱ����ʹ�����߶Ƚ��͵�Ŀ��߶ȡ�����ܸ�������פ��ʱ������ |


*��������ucF10���ͣ�ucF20����ȡ������һ����
������ ϵͳ����ɺͽṹ
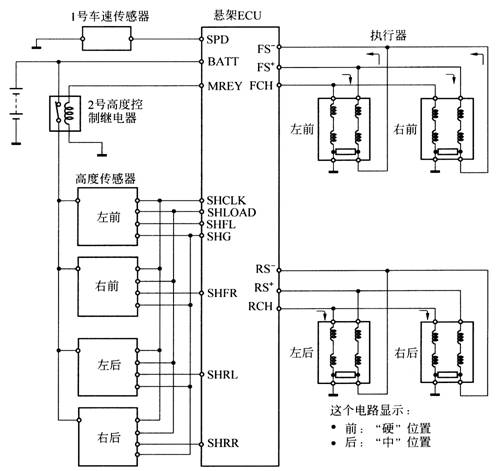
��־LS400�ĵ��ӿ��ƿ�������ϵͳ��Ҫ�ɿ������ɺͼ������ܳɡ�����ѹ��������������������ŷ����߶ȿ��Ʒ�������ECU���߶ȴ�������ת���������ܿ���ִ�����ͽ�����λ�ô�������ɡ���־LS400 ucFl0�Ͳ��õ�LRC���غ߶ȿ���ͨ�Ͽ�����ucF20������ȡ����ucF20���������˼��ٶȴ����������ܿ���ִ�������߶ȴ������ͶԿ����������˸Ľ�����Ӧ�أ�����ECU�Ŀ��Ʒ���Ҳ�����˸Ľ���ucFl0�ͺ�ucF20�͵��ӿ��ƿ�������ϵͳ�IJ��÷ֱ��ͼ10-4��ͼ10-5��
|
|
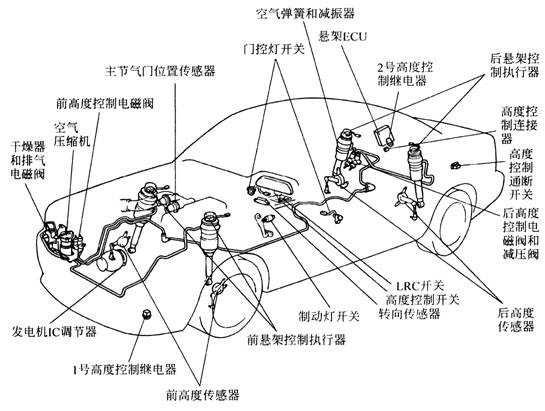
ͼ10-4 ucFl0���ӿ��ƿ�������ϵͳ
|
|
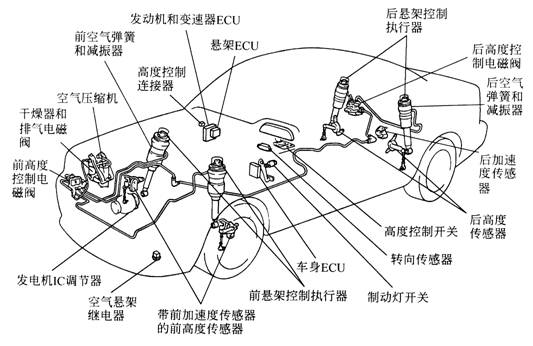
ͼ10-5 ucF20���ӿ��ƿ�������ϵͳ
һ��Ԫ���Ľṹ����ԭ��
1�����ܿ��ƿ���
����ucFl0���ͣ����ܿ��ƿ�����LRC���غ߶ȿ��ƿ�����ɣ���ͼ10-3��ʾ����LRC��������ѡ��������Ϳ������ɵĹ���ģʽ��NORMAL��SPORT�����߶ȿ��ƿ�������ѡ����ϣ���ij����߶ȣ�NORMAL��HIGH����
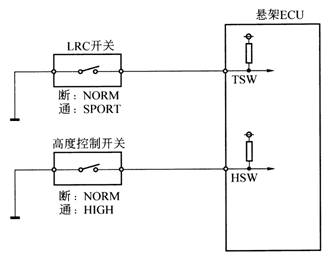
LRC���غ߶ȿ��ƿ���������ECU����ϵ��ͼ10-6��ʾ����LRC���غ߶ȿ��ƿ������ڡ�NORM��λ��ʱ��12V�ĵ�ѹ�ֱ��������ECU��TSW���Ӻ�HSW���ӣ���LRC�������ڡ�SPORT��λ�á��߶ȿ��ƿ������ڡ�HIGH��λ��ʱ������ECU��TSW���Ӻ�HSW���ӵĵ�ѹ��Ϊ0V������ECU�ݴ��ж�����ģʽ����LRC�������ڡ�SPORT��λ��ʱ������DZ��ڵ�LRCָʾ���������߶ȿ��ƿ������ڡ�HIGH��λ��ʱ������DZ��ڵ���һ�߶ȿ���ָʾ��Ҳ����
|
|
ͼ10-6 ���ܿ��ƿ��ص�·
����ucF20���ͣ������������ܿ���ϵͳ���ܵ���߶�ȡ����LRC���ء�
2���߶ȿ���ͨ�Ͽ���
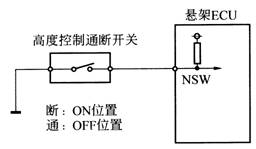
����ucFl0���ͣ���һ����λ��������Ĺ��ߴ������ڣ���ͼ10-7��ʾ�������ز���OFFλ�ã����ܿ���ϵͳ��ֹ�����߶ȿ��ơ���������������ͣ�ڲ�ƽ��·���������ҷʱ�������ɱ������������ѹ�������ų����Ӷ��ɷ�ֹ�����߶ȵ��½���
�߶ȿ���ͨ�Ͽ���������ECU����ϵ��ͼ10-8�������ز���OFFλ��ʱ������ECU��NSW���ӽӵأ���ѹΪ0V��ECU��ֹ�����߶ȿ��ơ�
|
|
|
ͼ10-7 �߶ȿ���ͨ�Ͽ��� ͼ10-8 �߶ȿ���ͨ�Ͽ��ص�·
����Ҫ��������������ʱ��һ��Ҫ�ض�������ء�������������λ��ONλ��ʱ�����������ܿ���ϵͳ�����ѹ�������ӿ����������ų��������³���ʱ���������ܻ�����Ͷ�����
����ucF20���ͣ�����ع���ʱ�������߶ȿ��Ʊ���ֹ��������һ����Ҳ���ٴ��ڡ�
����ucF20���ͣ�����Ҫ��������������ʱ��һ��Ҫ���ϵ�ء�����Ҫ�ڳ���������ʱ��ת�������������̽�TDCL�ϵ�TD��E1��������ֹ���ܿ���ϵͳ�ij����߶ȿ��ơ�
3���ƶ��ƿ���
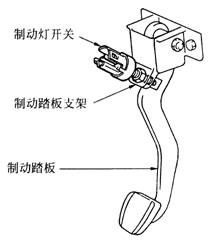
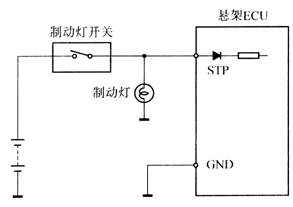
��һ����λ���ƶ�̤��֧���ϣ���ͼ10-9�����ƶ�̤�����ʱ�����ؽ�ͨ��12V�ĵ�ѹ��������ECU��STP�����ϣ���ͼ10-10��ʾ������ECU������һ�ź��ж������Ƿ����ƶ���
|
|
|
ͼ10-9 �ƶ��ƿ��� ͼ10-10 �ƶ��ƿ��ص�·
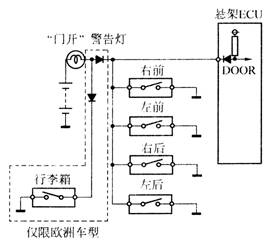
4���ſصƿ���
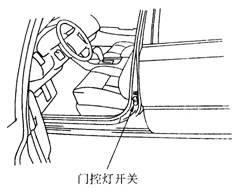
4�����Ÿ���һ���ſصƿ��أ���Щ���ض�λ�������ϣ���ͼ10-11��ʾ�������е��Ŷ�����ʱ�����п��ض��Ͽ������ص�ѹ��������ECU��DOOR�����ϣ�������һ���Ŵ�ʱ������ECU��DOOR���ӵ�ѹ��Ϊ0V����ͼ10-12��ʾ��ucFl0���ͣ�������ECU�ݴ��жϳ����Ǵ��ǹ��ϡ�
|
|
|
ͼ10-11 �ſصƿ��� ͼ10-12 �ſصƿ��ص�·��ucFl0�ͣ�
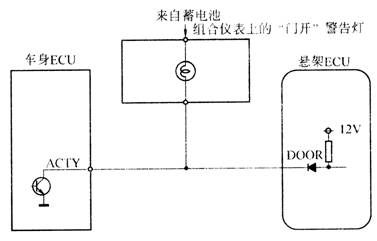
����ucF20���ͣ����ڲ����˶�·����ͨ��ϵͳ�������ŵ��ſصƿ��ز���ֱ��������ECU����������ͨ�������ŵ�ECU�ͳ���ECU�������ɳ���ECU������ECU������ϵ����ͼ10-13�����������ucF10������ͬ��
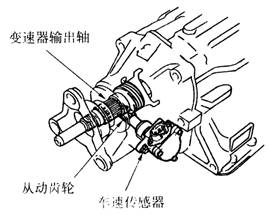
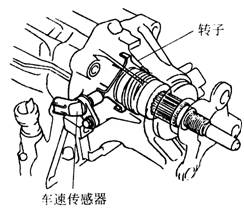
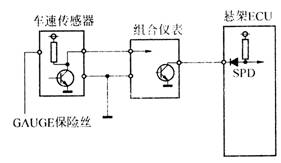
5�����ٴ�����
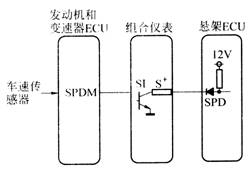
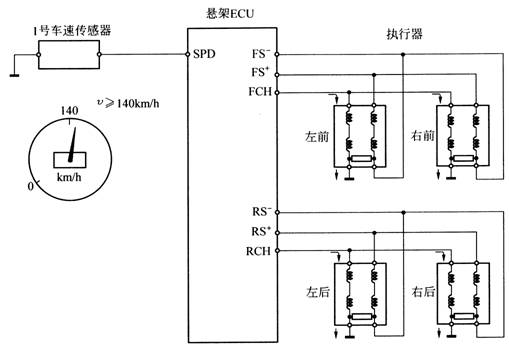
���ٴ�����λ�ڱ�����������ϣ���ͼ10-14��ucFl0����ͼ10-15��ucF20����������������������ת�١����ٴ�������������ʽ��ucFl0���Ͳ��ô���ʽ�������ÿתһȦ����20���źţ����źſ�ֱ����������DZ��ڵij��ٱ���֮������DZ��ڵ�����ת����·ת��Ϊ�����ÿתһȦ����4���źţ��ٴ��͵�����ECU����ͼ10-16����ucF20��������õ�Ÿ�Ӧʽ�����ٴ������Ƚ��ź��͵��������ͱ�����ECU���ɺ��߽������ź��͵�����DZ��ڵij��ٱ������������ٱ��������ź���������DZ���ת����ÿת4��������������ECU����ͼ10-17����
|
|
ͼ10-13 �ſصƿ��ص�·ͼ��ucF20�ͣ�
|
|
|
ͼ10-14 ���ٴ�������ucFl0�� ͼ10-15 ���ٴ�������ucF20��
|
|
|
ͼ10-16 ���ٴ�������·��ucF10�� ͼ10-17 ���ٴ�������·��ucF20��
6��������λ�ô�����
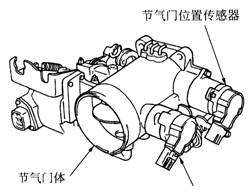
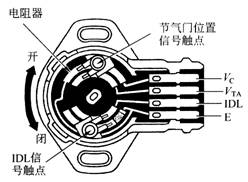
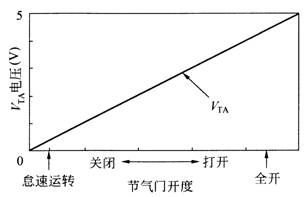
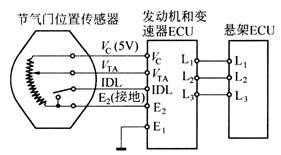
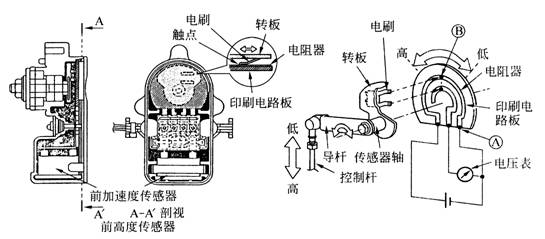
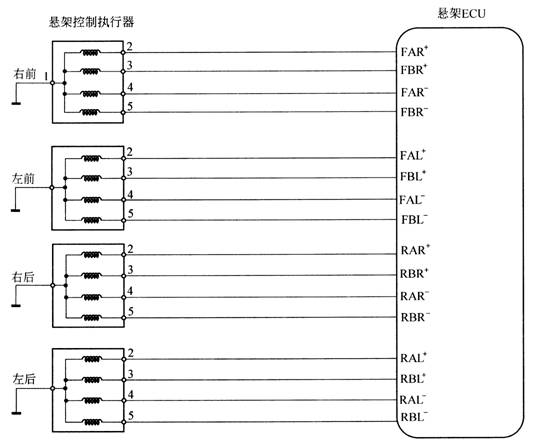
������λ�ô�����װ�ڽ��������ϣ���ͼ10-18�������������ŵĿ��ȡ��������Ľṹ��ͼ10-19���������ͱ�����ECU��5V�ĺ㶨��ѹ���ڴ�������Vc�����ϣ����������Ľ������źŴ���������ſ����ڿɱ�������ϻ���ʱ�����ڴ�����VTA�����ϵĵ�ѹ��������ſ��ȳ����ȣ���ͼ10-20��
|
|
|
ͼ10-18 ������λ�ô����� ͼ10-19 ������λ�ô������ṹ
|
|
ͼ10-20 ������λ�ô������ź�
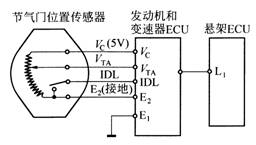
�������ͱ�����ECU����һ���������ſ��ȵ��ź�VTA������ת���͵�����ECU������ucFl0���ͣ��������ͱ�����ECUͨ��L1��L2��L3�������ſ����źŴ��͵�����ECU����ͼ10-21������ucF20���ͣ��������ͱ�����ECUֻ��L1��ɽ������ſ����ź��͵�����ECU����ͼ10-22��
|
|
|
ͼ10-21 ������λ�ô�������·��ucFl0�� ͼ10-22 ������λ�ô�������·��ucF20��
7�������IC������
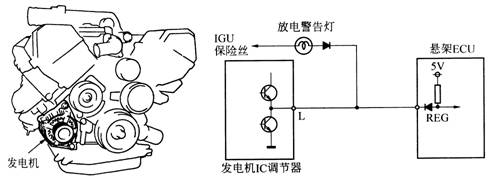
�����IC������λ�ڷ������Ľ���������ڣ���ͼ10-23��IC��������L�����ڷ�������תʱ������������磩Ϊ���ص�ѹ���ڷ�����ֹͣʱ��������������磩������1.5V��IC��������L����ֱ��������ECU��REG�������ӣ�����ECU�ݴ��жϷ������Ƿ���ת������ECU������һ�źţ�������ת��߶ȵȴ������ļ���ʧЧ������
|
|
ͼ10-23 �������ѹ�����������·
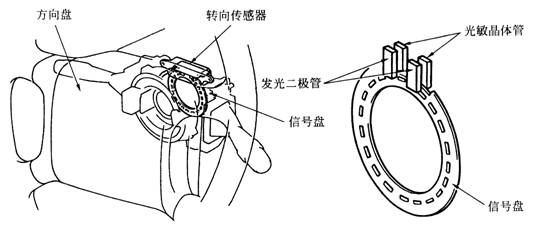
8��ת����
ת����λ����Ͽ����ܳ��ڣ���ͼ10-24�����ڼ������ת��ķ����ת��ĽǶȡ�ת������һ���ź��̣��з�Բ�̣��������ڹ�����ɡ�ÿ���ڹ�����һ����������ܺ�������ܣ���������ã����̶���ת�����������ź�����Բ�ܿ���20����죬�����̶��ڷ����������ϣ�������ת����ת����
|
|
ͼ10-24 ת����
������ת��ʱ��������ת�����ź���Ҳ��֮ת������ECU-IG����˿�����ĵ���ʹ������������ܷ��⣨��ͼ10-25�������ź�����������������ܺ��������֮��ͨ��ʱ���ӷ�������ܷ����Ĺ��߱������жϺ�ͨ�������������Ҳ�ͱ�����߽����ͨ���жϡ�������������Trl��Tr2�Ͱ������Թ�������ܵ��źŶ�����ͨ���źš����ԣ������������Թ�������ܵ�ͨ�����źŴ�����ECU��SS1��SS2��������������Tr1��Tr2������������ʱ�ź�Ϊ1������������ʱ�ź�Ϊ0����ϳ��ź���ͼ10-25��ʾ������ECU������Щ�źŵı仯�����ת��ķ����ת��ĽǶȡ�
|
|
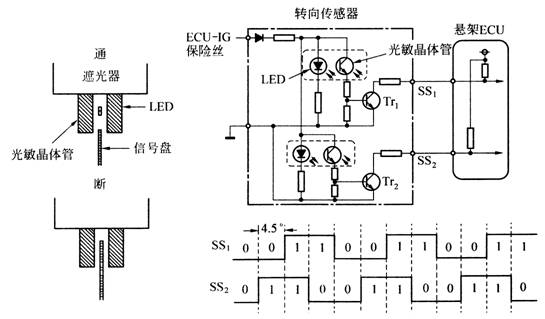
Ȧ10-25 ת����
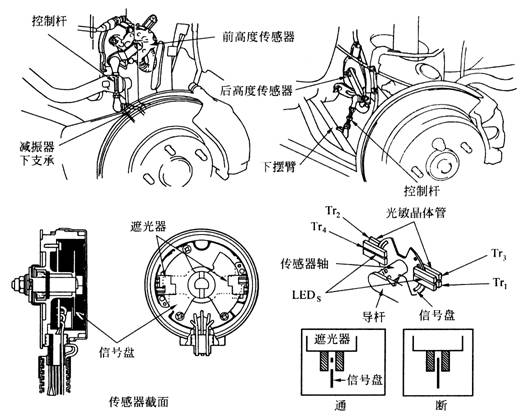
9���߶ȴ�����
�߶ȴ������������Ǽ����߶ȼ���·�治ƽ�����ÿ�����ܵ�λ����������֮ת���ɵ����ź����뵽����ECU��
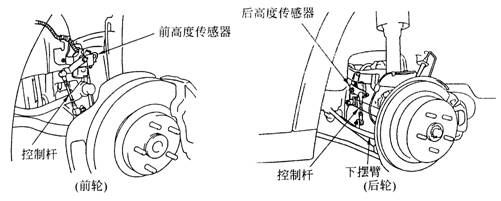
�߶ȴ�������������ʽ������ucFl0���͵Ĺ��ʽ������ucF20���͵�����ʽ��������ʽ�ĸ߶ȴ�������װλ�ö���ͬ����װ�ڳ����ϣ���������ͨ������������˵���������Ƹ�����������ǰ���ܣ����Ƹ˵���һ�����������֧�����������ں����ܣ����Ƹ˵���һ�����ӵ������°ڱۣ���ͼ10-26��ucFl0����ͼ10-29��ucF20����
��1�����ʽ�߶ȴ�������
�������ڲ���һ���з��ź��̺�4���ڹ������ź��̶̹��ڴ��������ϣ��ɵ��˴�����ת�����ڹ����ɷ�������ܺ����������ɣ��ڷ�������ܺ��������֮������ź��̡��������߶ȷ����仯������·�治ƽ��ɸ����ܵ�λ���������仯ʱ���ź����ڵ��˵Ĵ�����ת����ʹ��������ܵĹⱻ�ڵ���ͨ�����Ӷ�ʹ���չ��ߵĹ���������жϻ�ͨ��ͼ10-26��ʾ����Щͨ���ź��͵�����ECU������ECU�Ϳ��Լ��������߶ȵı仯��
|
|
ͼ10-26 �߶ȴ�������ucFl0��
���ݴ�������ʹ�õ��ڹ���������ͨ�����ڹ���ͨ�����źŵ���ϣ��ɰѳ����߶ȷ�Ϊ��ͬ�����������Ա�Գ����߶Ƚ��о�ȷ�Ŀ��ơ���־LS400 ucFl0��ʹ����4���ڹ�������4���ڹ���ͨ���źŵ���ϣ��ɰѳ����߶ȴӵ����߷�Ϊ16�������10-3��ʾ��
![]() ��10-3 �����߶Ⱥʹ���������Ĺ�ϵ
��10-3 �����߶Ⱥʹ���������Ĺ�ϵ
|
��������� |
��� |
�� |
�� |
�� |
��� |
|||||||||||
|
�� |
�� |
�� |
�� |
�� |
�� |
�� |
�� |
�� |
�� |
�� |
�� |
�� |
�� |
�� |
�� |
|
|
Tr1 |
�� |
�� |
�� |
�� |
�� |
�� |
ͨ |
ͨ |
ͨ |
ͨ |
ͨ |
ͨ |
ͨ |
ͨ |
�� |
�� |
|
Tr2 |
�� |
�� |
ͨ |
ͨ |
ͨ |
ͨ |
ͨ |
ͨ |
ͨ |
ͨ |
�� |
�� |
�� |
�� |
�� |
�� |
|
Tr3 |
�� |
�� |
�� |
�� |
ͨ |
ͨ |
ͨ |
ͨ |
�� |
�� |
�� |
�� |
ͨ |
ͨ |
ͨ |
ͨ |
|
Tr4 |
�� |
ͨ |
ͨ |
�� |
�� |
ͨ |
ͨ |
�� |
�� |
ͨ |
ͨ |
�� |
�� |
ͨ |
ͨ |
�� |
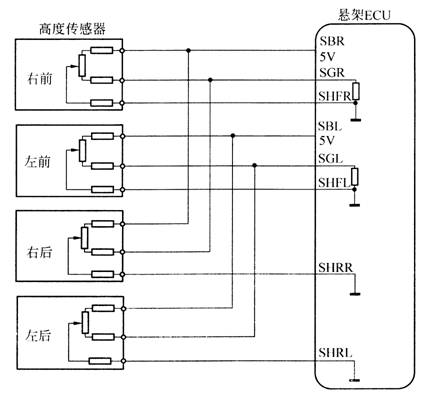
ÿ���߶ȴ������ij����߶��źż�Ϊ��4���ڹ����еĹ��������Tr1��Tr2��Tr3��Tr4˳�����е�ͨ���źţ�4���߶ȴ��������Ѱ�˳�����кõ��ź��͵�����ECU��SHFR��SHFL��SHRR��SHRL���ӣ���ͼ10-27����������ECU��SHCLK��SHLOAD�����ͳ����ź��ǹ�4���߶ȴ���������ʱ�õĻ��źš����磬����ͼ10-28��ʾ�ĸ߶��ź������߶ȴ������͵�����ECU��SHRL����ʱ������ECU�Ͱ��ջ��ź�SHCLK��SHLOAD����ʱʱ���������߶ȴ�������Trl��Tr2��Tr3��Tr4�ֱ�Ϊ�ϡ�ͨ��ͨ�Ͷϣ������жϸô������߶�Ϊ�ڢݼ�������10-3����
|
|
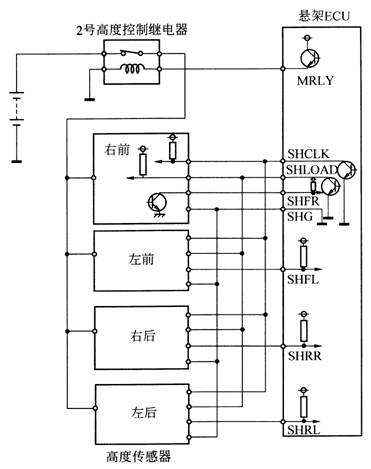
ͼ10-27 �߶ȴ�������·
|
|
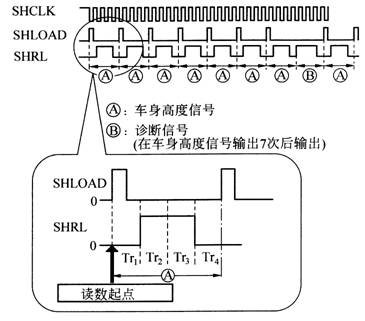
ͼ10-28 ���ź�
��2������ʽ�߶���������
����ʽ�߶��������İ�װ����ʽ�߶ȴ�������ͬ����ͼ10-29��ʾ������ʽ�߶ȴ���������������λ�����ı仯����ɵ�������ֵ�ı仯���õ�����ʽ����������ִ�������⾫�ȸ��ߡ�
|
|
ͼ10-29 ����ʽ�߶�������
�������ɴ������ᡢת�塢��ˢ��ӡˢ��·����ɣ��������ᡢת�����ˢ��ϳ�һ�����壬�ɵ��˴�����ת����ӡˢ��·������һ����������ˢ���ڵ������ϻ�������ͼ10-30��ʾ����
|
|
ͼ10-30 ����ʽ�߶��������ṹ��ԭ��
�����ڳ����߶ȵı仯ʹ��ת�����������һ��ĵ�ˢ�ڵ������ϻ���ʱ��A��B֮��ĵ���ֵ�ͷ����仯������ֵ�ı仯��ת���ת���Ƕȳ����ȣ�Ҳ���복���߶ȵı仯�����ȡ�������ECU��һ���㶨��ѹ�ӵ�����������ʱ��A��B֮������ĵ�ѹ�仯ȡ����ת���ת���Ƕȡ���һ��ѹ�ź��͵�����ECU������ECU���ɴӵ�ѹ�ı仯�м��������߶ȵı仯����ͼ10-31��
|
|
ͼ10-31 ����ʽ�߶���������·ͼ��ucF20��
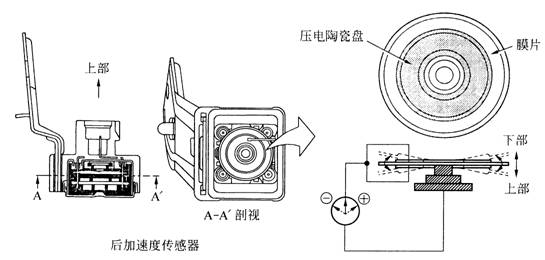
10�����ٶȴ�����
���ٶȴ������������������Ĵ�ֱ���ٶȡ�ֻ��ucF20�����װ�м��ٶȴ����������ٶȴ���������3��������ǰ���ٶȴ������ֱ�װ��ǰ��ǰ�Ҹ߶ȴ������ڣ�һ������ٶȴ�����װ���������Ҳ�����棬��ͼ10-32����3�����ٶȴ������ֱ������ǰ��ǰ�Һͺ���λ�õĴ�ֱ���ٶȡ���������λ�õĴ�ֱ���ٶ���������ECU����3�����ٶȴ���������õ������Ƶ�������
|
|

ͼ10-32 ���ٶȴ�����
���ٶȴ�������Ҫ��ѹ���մ��̺�ĤƬ��ɣ���ͼ10-33��ʾ������ѹ���մ��̶̹���ĤƬ���࣬��֧���ڴ��������ġ������ٶ�����������������ʱ��ѹ���մ����������������������������Ρ�����ѹ���մɵ����ԣ����ǽ��������������ʳ��������仯�ĵ�ɡ���Щ����ɴ������ڵĵ��ӵ�·ת����������ʳ��������仯�ĵ�ѹ�����͵�����ECU����ͼ10-34��ʾ��
|
|
ͼ10-33 ���ٶȴ������ṹ������ԭ��
|
|
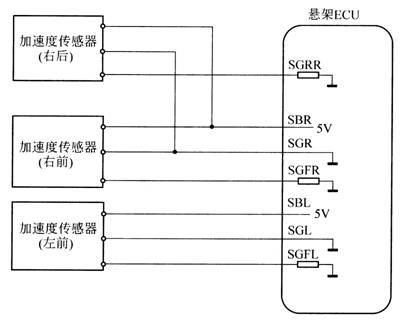
ͼ10-34 ���ٶȴ�������·
����ECU���ݴӼ��ٶȴ��������յ����źż����4�����ֵĵ���֧�������Ĵ�ֱ���ٶȡ����⣬����ECU��ͨ���߶ȴ��������������֧�������ͷǵ���֧������֮�������ٶȡ�������Щ���ݣ�����ECU��4�����ֵļ���������������ֵ���Ի���ȶ���������ʻ״̬�����������ʻ���ȶ��ԡ�
11�����ܿ���ִ����
���ܿ���ִ����װ�ڸ��������ɺͿɵ����������Ϸ�����ͼ10-35��ʾ������ucF10���ͣ�ִ����ͬʱ������������ת���Ϳ������ɵ���ͨ�����Ըı�������ļ�������Ϳ������ɵĸնȣ�����ucF20���ͣ�ִ����ֻ������������ת����
|
|
ͼ10-35 ���ܿ���ִ������ucF10��
UcF10�����ܿ���ִ������һ����3�������ĵ�ŷ���ucF20������һ����9�������IJ��������
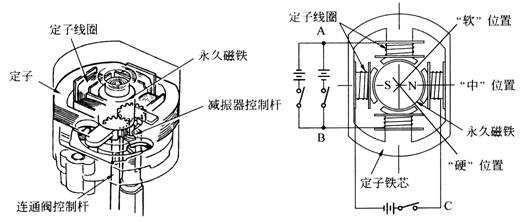
��1��ucF10�ĵ�ŷ�ʽ���ܿ���ִ������
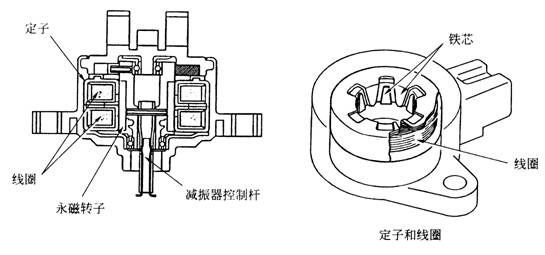
ִ�����ɵ�����������ܹ���ȷ�ض�Ƶ���仯����ʻ��������������Ӧ����ŷ���4���������飨��о����Ȧ�������ô���ת����ɣ���ͼ10-36��ʾ���������������������Ȧʱ���ڶ�����о�в������������������������Ȧ�ĵ���������ECU���ڡ�����ECUͨ����������������Ȧ�������������ı䶨����о�ļ��ԣ�����N���䵽S�������S����ΪN�����ֻ��DZ�Ϊ�Ǽ���״̬�����ô���ת���ɶ�����Ȧ�����Ĵ�����ת�������ô���ת����������ɵ���ͨ������������һ�����壬��ͨ��һ�Գ������������ת�����Ƹ�������
|
|
ͼ10-36 ��ŷ�ʽ���ܿ���ִ������ucF10��
���ܿ���ִ������·��ͼ10-37��ִ������Ϊǰ�������飬ǰ��ǰ�Һͺ�����Ҿ�ͬʱ�������Ժ�ִ����Ϊ����������������ECU��RS-��������ִ��������������ECU��RS+��������ʱ��ִ�������Ƹ˵�λ�ôӡ��С���Ӳ��ת����������������������ECU��RCH��������ִ����������ִ������4���ӽӵ�ʱ��ִ�������Ƹ˵�λ�ôӡ�Ӳ��������ת�����С���������������ECU��RS+��������ִ��������������ECU��RS-��������ʱ��ִ�������Ƹ˵�λ�ôӡ��������С�ת����Ӳ������10-3��ʾ������������о���ԡ��������������ᡢ�������ɸնȺ�ִ��������֮��Ĺ�ϵ��
|
|
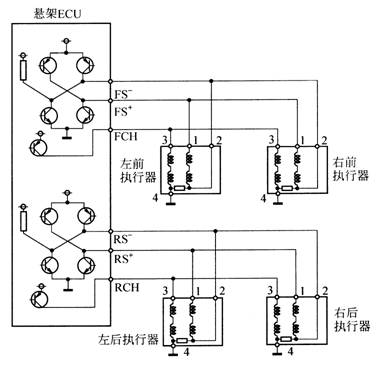
ͼ10-37 ���ܿ���ִ������·��ucF10��
��10-3 ��ŷ�ʽ���ܿ���ִ����
|
�������� |
�� |
�� |
Ӳ |
|
|
���ɸն� |
�� |
Ӳ |
Ӳ |
|
|
���Ӽ��� |
1��FS+�� |
|
�� |
|
|
2��FS-�� |
|
�� |
|
|
|
3��FCH�� |
�� |
|
�� |
|
|
4 |
�� |
|
�� |
|
|
������о |
|
|
|
|
|
ִ�����Ķ��� |
|
|
|
|






��2��ucF20�IJ������ʽ���ܿ���ִ������
����ִ�����ɲ������������������3��ʽ�ĵ�ŷ���ȣ��ɻ�ø����ٵ���Ӧ����ȷ�Ŀ��ƣ���������ڲ�ƽ·����ʻʱ�ɻ�ø��ѵ����ܿ���Ч����
�������װ�����ܿ���ִ�����ڣ��ɶ��Ӻ���Ȧ�Լ�����ת����ɣ���ͼ10-38��ʾ������������12������о���������ݶ����ã�������Ȧ����������о�ϣ������߷����෴��ת������һ������12�������ô�����������ECU��������Ȧͨ����������ʱ���ڶ����ϱ�����������ʹ���ô���ת��ת�����Ӷ�ͨ�����������Ƹ�ʹ������ת��ת��������ECUÿʩ��һ������������ת��ת��һ����һ����1/24Ȧ��15�㣩������ı�����������ʩ��˳�������Ҳ������ת���������Ϊ�ǽӴ��͵������������������ʩ�ӷ�ʽ���������ɿ���ת�ӵ���ת�ٶȺ�ͣ��λ�á����·��ͼ10-39��ʾ��ÿ�����ܿ���ִ�����ɶ���������
|
|
ͼ10-38 �������ʽ����ִ����
|
|
ͼ10-39 �������ʽ���ܿ���ִ������·
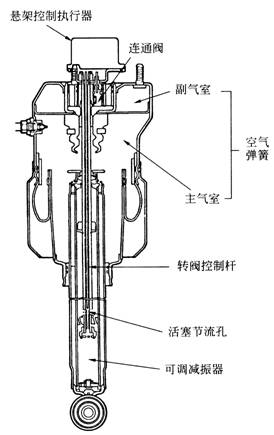
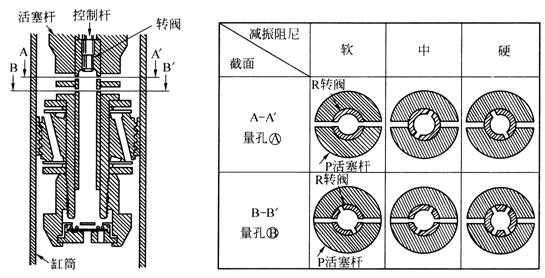
12���ɵ�ʽ������
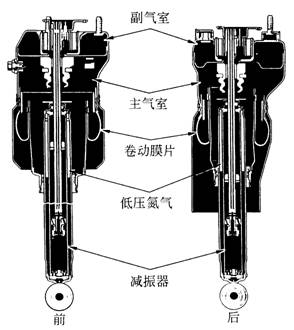
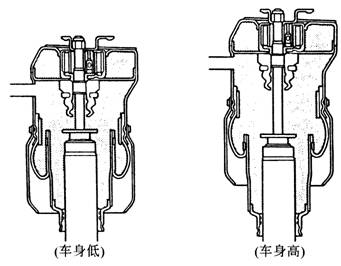
�ɵ�ʽ������װ�ڿ����������棬���������һ������֧�����϶��복�����ӣ��¶�װ�����ܰڱ��ϣ���ͼ10-40��ʾ��
|
|
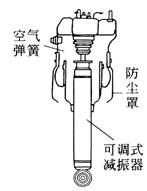
ͼ10-40 �������ɺͼ������ܳ�
�ɵ�ʽ��������������ĸı������������������������ı仯��ʵ�ֵģ��������ı仯�ǿ��ı���������Ĵ�С��ʵ�֡���ucF10����Ϊ��������Ƹ�����һ���ת��������������ף���������Ҳ�����������ס����ܿ���ִ�����������Ƹˣ�ʹת���ڻ�������ת�����Ӷ���ر���Щ�����ף�ʹͨ����Щ��������Һ�������仯���Դ������Ƽ������ļ������ᣬ��ͼ10-41��ʾ��
|
|
ͼ10-41 �ɵ�ʽ������
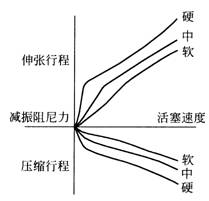
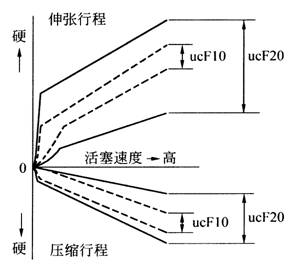
������A��B���ϵIJ�ͬ��ϣ��ɵõ�������������������3���仯����������������������������ͼ10-42��
|
|
ͼ10-42 ������������������
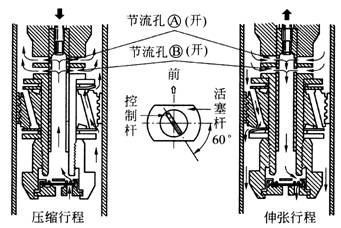
�ɵ�ʽ�����������������仯״̬���£�
1��������������������
������A��B������������Һ������ͼ10-43��ʾ��
|
|
ͼ10-43 ����������������Ϊ������
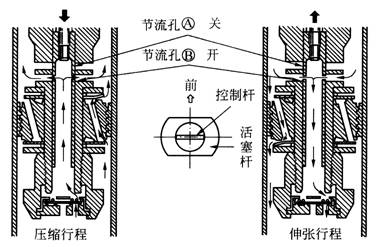
2������������Ϊ���С���
������A�رգ�������B����������Һ������ͼ10-44��ʾ��
|
|
ͼ10-44 ����������������Ϊ���С�
3������������Ϊ��Ӳ����
������A��B���رգ���������Һ������ͼ10-45��ʾ��
|
|
ͼ10-45 ����������������Ϊ��Ӳ��
ucF20���͵Ŀɵ�ʽ�������ṹ����ԭ����ucFl0���ͻ�����ͬ�������ڲ����˲������ʽ���ܿ���ִ�������������ļ����������仯��Χ��ucFl0��ܶ࣬�����������ı仯Ҳ��3����Ϊ�����仯����ͼ10-46��ʾ��
|
|
ͼ10-46 ����������������
���⣬ucF20�Ŀɵ�ʽ��������������һ���������ɣ���ͼ10-47��ʾ����һ���ɿ���Ч������������̬�ı仯����������ת��ʱ���������ɿ����������ڲ�ֵ��������ƣ����ƶ�ʱ����������Ҳ����Ч����ֹ�������ֵ��������ơ�
|
|
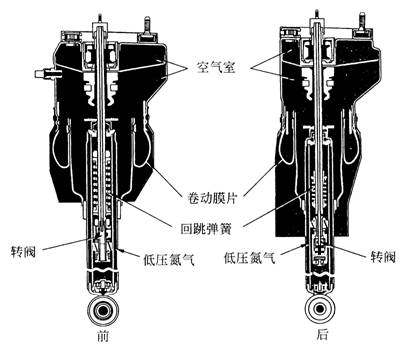
ͼ10-47 ǰ����������ɺͼ������ܳɣ�ucF20��
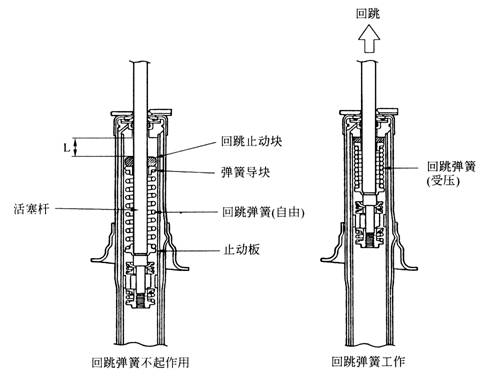
��ͼ10-48��ʾ����������һ��װ�������������������һ���ֹ�����ϣ���һ��װ�ڿ��ػ����˻����ĵ��ɵ����ϣ�һ������ֹ����װ�����ɵ����ϡ����������ɵ�ֹ����δ�����������ϲ�ʱ���������ɲ����κ����á�����ͼ10-48��ʾ��L��Χ�ڣ����ּ���������ucFl0������һ����ʹ�����������õij��������ԡ�
|
|
ͼ10-48 ��������������
13����������
�������ɰ�װ�ڿɵ��������϶ˣ���ɵ�ʽ������һ������֧�����϶��복�������ӣ��¶�װ�����ܰڱ��ϡ�
��1��ucFl0�Ŀ������ɡ�
ucFl0���͵�ǰ����������ɺͼ������ܳ���ͼ10-49��ʾ��
|
|
ͼ10-49 ǰ��������ɺͼ������ܳɣ�ucF10��
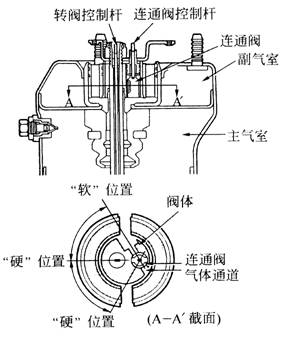
ucF10���͵Ŀ���������Ҫ��һ�������Һ�һ����������ɣ���ͼ10-50��ʾ����������֮������ͨ����������ͨ������������ִ����ͨ����ͨ�������������ƣ�����ͨ��ر�����������֮��Ŀ���ͨ����ʹ�������ɵ���Ч�����ݻ��ı䣬�Ӷ�ʹ�������ɵĸնȷ����仯�����⣬������Ҳ��һ�������ң����²��о���ĤƬ���ο�ͼ10-49����ͨ�������������ڵ�ѹ�����������Ϳɵ��������߶ȡ�
|
|
ͼ10-50 ��������
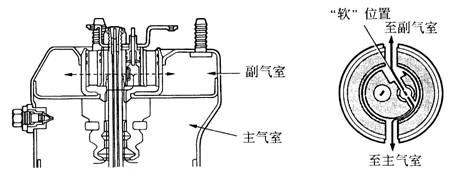
����ͨ��ת����ͼ10-51��ʾ��λ��ʱ�����������ҵ�����ͨ�����������ҵ����徭��ͨ�����м���븱���ҵ�������ͨ���൱�ڿ������ɵĹ����ݻ����������ɵĸն�Ϊ��������
|
|
ͼ10-51 �������ɡ�����
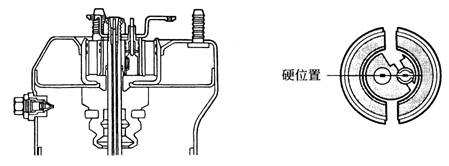
����ͨ��ת����ͼ10-52��ʾ��λ��ʱ�����������ҵ�����ͨ�����رգ�����������֮������岻�����������ʱ�Ŀ�������ֻ�������ҵ�����μӹ������������ɵĸն�Ϊ��Ӳ����
|
|
ͼ10-52 �������ɡ�Ӳ��
���⣬�������ɻ����Կ��Ƴ����߶ȡ�����Ҫ���߳���ʱ���ɿ���ѹ�������Ŀ��� ���߶ȿ��Ƶ�ŷ���������ɵ������ҳ�����ʹ�����������ţ��Ӷ�ʹ�����߶����ӣ�����Ҫ���ͳ����߶�ʱ���������������ҵĿ�����������ŷ��ų���������ʹ�����������������ͳ����߶ȡ����ԣ�ͨ�����������������������ڵĿ���������ʵ�ֶԳ����߶ȵĿ��ƣ���ͼ10-53��ʾ��
|
|
ͼ10-53 �����߶ȿ���
��2��ucF20�Ŀ������ɡ�
ucF20�Ŀ������ɺͼ������ܳ���ͼ10-47��ʾ��
���ֿ���������ucFl0�����ڽṹ����ԭ�����������ͬ����Ҳ�в�ͬ�ĵط�����Ҫ�ǰ��������������Ϊһ����һ�Ŀ����ң�ʹ�������ɵĿ���������Ӵ�ѹ������������Ҳ�ӴӶ�����˳��������ԡ�
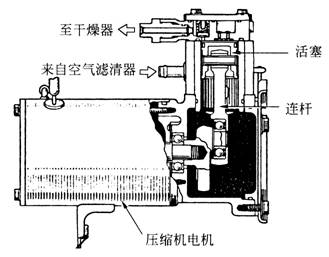
14������ѹ����
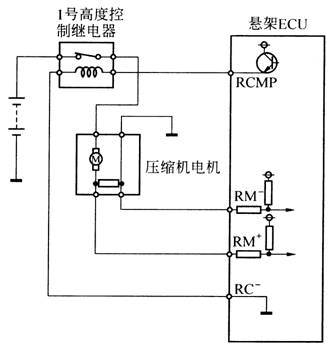
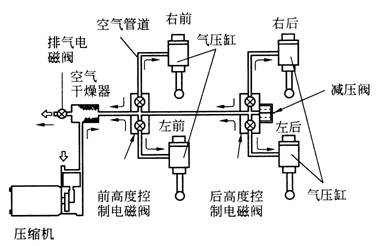
����ѹ�������������������߶ȵ��������ѹ����������ͼ10-54��ʾ������ѹ�������õ���������ʽ�ṹ����ֱ��������������·��ͼ10-55��ʾ������ECUͨ������1�Ÿ߶ȿ��Ƽ̵��������ƿ���ѹ�����������ڳ�Ա�����������غ�����ʱ�������߶Ƚ��ͣ�����ECU����1�Ÿ߶ȿ��Ƽ̵�������������ѹ���������߶ȿ��Ƶ�ŷ������������������ҳ�����ʹ�����߶����ߣ������ڳ�Ա�����������غɼ���ʱ�������߶Ȼ���������ʱ����ECU�߶ȿ��Ƶ�ŷ���������ŷ���ʹ���������������ڵĿ����ų����Ӷ�ʹ�����½������⣬����ECUͨ������RM+��RM-���ӵĵ�ѹ���жϵ��������״̬�����ڼ��쳣���ʱ��ֹ�߶ȿ��ơ�
|
|
ͼ10-54 ����ѹ����
|
|
ͼ10-55 ����ѹ������·
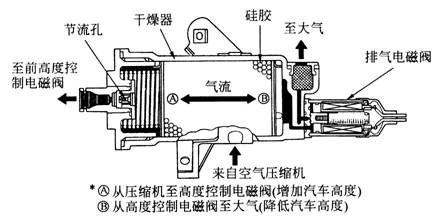
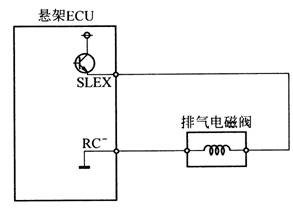
15����������������ŷ�
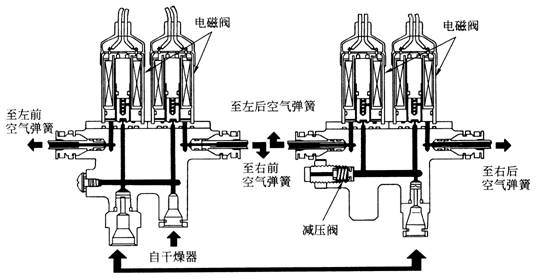
��������������ȥ��ѹ�������е�ˮ�֡�
������ŷ��������ǽ����������ڵ�ѹ�������ų���������ͬʱ�����������е�ˮ�ִ��ߡ�
���ߵĽṹ��ͼ10-56��������������й轺��������������յ�ˮ����������ŷ���ʱ���ߣ����Թ轺����������������������ϵͳά��ʱ�������ж�������������ܷ�ÿ����ܵ��ӿڣ����ӳ��轺��ʹ��������
|
|
ͼ10-56 ��������������ŷ�
������ŷ�������ECU���ƣ����յ���������ECU��SLEX���ӵĽ��������߶ȵ��ź�ʱ��������ŷ�����ѹ�������ӿ��������ŵ�������ȥ��
|
|
ͼ10-57 ������ŷ���·
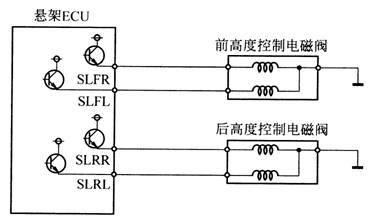
16��ǰ��߶ȿ��Ƶ�ŷ�
�߶ȿ��Ƶ�ŷ��������Ǹ�������ECU�Ŀ����źſ��ƿ������ܵij�����������ǰ�߶ȿ��Ƶ�ŷ�����ǰ���ܣ�����������ŷ���ɣ��ֱ�������ҿ������ɡ���߶ȿ��Ƶ�ŷ����ں����ܣ�Ҳ����������ŷ���ɣ���ǰ���Ƶ�ŷ���ͬ���ǣ�������ŷ����ǵ�������������ͬʱ��������߶ȿ��Ƶ�ŷ��л�װ��һ����ѹ����������ֹ�����ܵ���ѹ�����ߡ���ͼ10-58��ʾ��
|
|
ͼ10-58 �߶ȿ��Ƶ�ŷ�
�߶ȿ��Ƶ�ŷ��ĵ�·��ͼ10-59��ʾ���������ECU��SLFR������������������Ӧ�ĵ�ŷ���������ǰ��߶����ͣ��������ECU�õ�����SLRR��SLRL�������������߶ȿ��Ƶ�ŷ���������ŷ������������߶����͡�
|
|
ͼ10-59 �߶ȿ��Ƶ�ŷ���·
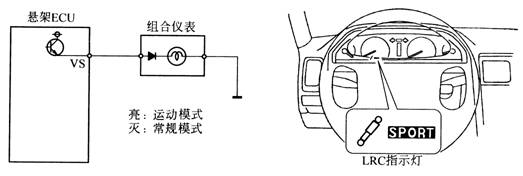
17��LRCָʾ��
����ucFl0���ͣ�LRCָʾ��λ������DZ��ϣ���ͼ10-60��ʾ�����ָʾ������ָʾ��ǰ�������Ϳ������ɵĹ���ģʽ����NORM����SPORT��������ѡ��SPORT�����˶���ģʽʱ��ָʾ��������ѡ��NORM�������棩ģʽʱ��ָʾ����
|
|
ͼ10-60 LROָʾ�Ƽ����·
����ucF20���ͣ���������ϵͳ������߶�ȡ����LRC���أ����Ҳȡ����LRCָʾ�ơ�
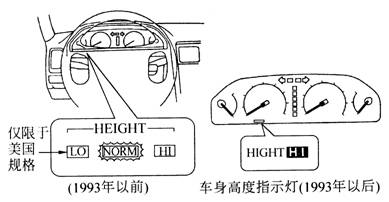
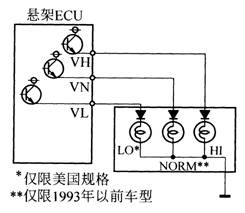
18�������߶�ָʾ��
����1993����ǰ��ucFl0���ͣ������߶�ָʾ����2����HI��NORM����3��[HI��NORM��LO��LO���������������]������1993�꼰�Ժ��ucFl0���ͣ������߶�ָʾ��ֻ��һ����HI������ͼ10-61��ʾ����Щָʾ�ƾ�λ������DZ��ϣ�����ָʾ��ѡ��ij����߶ȡ��������߶ȿ��ƿ��ص�λ�øı�ʱ��ָʾ������ָʾ���л����λ�ã���Ҫ�ﵽ���趨�ij����߶�����Ҫһ����ʱ�䡣ָʾ�Ƶĵ�·��ͼ10-62��ʾ��
|
|
ͼ10-61 �����߶�ָʾ��
|
|
ͼ10-62 �����߶�ָʾ�Ƶ�·
19���߶ȿ���������
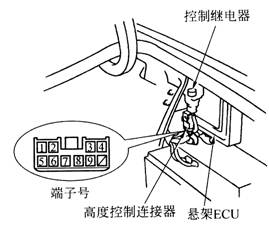
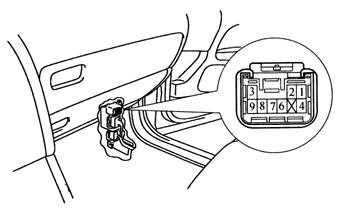
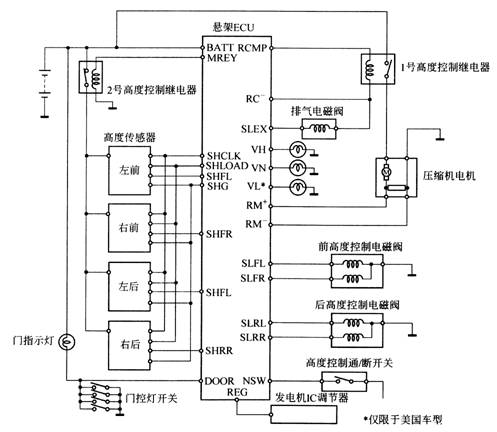
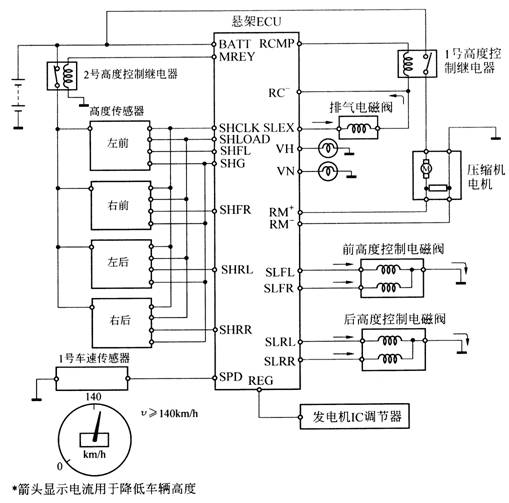
���������Ը߶ȿ���ϵͳ�ļ��������ṩ�˺ܴ㡣ͨ�����Ӹ��������ϵIJ�ͬ���ӣ����Բ���ͨ������ECU��ֱ�Ӳ���ѹ����������߶ȿ��Ƶ�ŷ������������Ӷ����Ƴ����߶ȡ����⣬ucFl0���͵����������ṩ���������ECU�й��ϴ���Ķ��ӡ���־LS400 ucFl0���͵ĸ߶ȿ������������ں��������ҲࣻucF20����������������£���ͼ10-63��ͼ10-64�����߶ȿ��������������ӵ����Ӽ���Ӧ�Ŀ������10-4�ͱ�10-5��
|
|
ͼ10-63 �߶ȿ���������ucF10
|
|
ͼ10-64 �߶ȿ�����������ucF20��
��10-4 �߶ȿ������������ܣ�ucF10��
|
���� ���� |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
|
������ǰ���� |
|
|
|
|
|
|
�� |
|
|
|
������ǰ���� |
|
|
|
|
|
|
�� |
|
|
|
�����Һ����� |
|
|
|
|
|
|
�� |
|
|
|
����������� |
|
|
|
|
|
|
�� |
|
|
|
������ǰ���� |
|
|
|
|
|
�� |
|
|
|
|
������ǰ���� |
|
|
|
|
|
�� |
|
|
|
|
�����Һ����� |
|
|
|
|
|
�� |
|
|
|
|
����������� |
|
|
|
|
|
�� |
|
|
|
|
������ϴ��� |
|
|
|
|
|
|
|
|
�� |
![]() �� ����ʾ����
�� ����ʾ����
��10-5 �߶ȿ������������ܣ�ucF20��
|
���� ���� |
1 |
2 |
3 |
6 |
7 |
8 |
9 |
|
������ǰ���� |
|
|
|
�� |
|
|
|
|
������ǰ���� |
|
|
|
�� |
|
|
|
|
�����Һ����� |
|
|
|
|
|
|
�� |
|
����������� |
|
|
|
|
|
�� |
|
|
������ǰ���� |
|
|
|
|
�� |
|
|
|
������ǰ���� |
|
|
|
|
�� |
|
|
|
�����Һ����� |
|
|
|
|
|
|
�� |
|
����������� |
|
|
|
|
|
�� |
|
![]() �� ����ʾ����
�� ����ʾ����
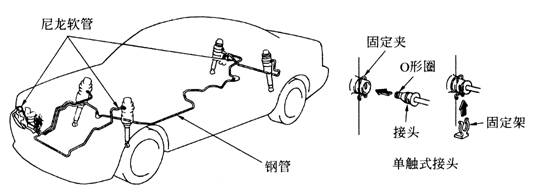
20������
��������ϵͳһ����øֹܺ�����������Ϊ�����ܡ��ֹ����ڹ̶��ڳ����ϵ�ǰ����߶ȿ��Ʒ�֮��Ĺ̶��ܵ����������������������������߶ȿ��Ʒ�֮���������˶��Ĺܵ��������������õ���ʽ��ͷ���Է���ά�;������õ��ܷ��ԣ���ͼ10-65����
|
|
ͼ10-65 ���ܺͽ�ͷ
���Ľ� ����ϵͳ
��������ϵͳ������ECU���ơ������ԭ����ͼ10-66��ͼ10-67��ʾ����·��ͼ10-68��ucF20����ͼ10-69��ucF10����ʾ��
|
|
ͼ10-66 ��������ϵͳ�Ŀ���ԭ����һ��
|
|
ͼ10-67 ��������ϵͳ�Ŀ���ԭ��������
|
|
ͼ10-68 ucF20��������ϵͳ��·ͼ
|
|
ͼ10-69 ucF10��������ϵͳ��·ͼ
����ECU���ݴӸ��������������ź��Լ����ܿ��ƿ��ص�ѡ��ģʽ�����ؿ���4�������ϵļ��������������������ܵ��ɸնȣ�ucFl0���ͳ����߶ȡ�����ECU������������Ϲ��ܣ����ɶ����ܿ���ϵͳ�Ĺ��Ͻ�����ϣ��ѹ��ϴ��봢���ڴ�����������˾��������ʾ������ECU�־߱�ʧЧ�������ܣ���ϵͳ���ֹ���ʱ�ɽ�ֹ�����֧�����ܿ��ơ�
һ�������������͵��ɸնȿ���
��һ���ƾ������¹��ܣ�
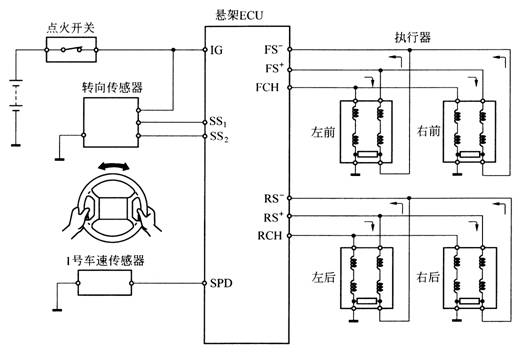
1����������ƣ���ͼ10-66��ͼ10-67��ͼ10-68��ͼ10-69��
����������ת���л���S����·�����Ƴ����IJ��㡣���ݳ��ٺ�ת��Ƕȣ�����ECUʹ������FS+��RS+�����������Ӷ�������ִ���������ڡ�Ӳ����λ�ã���ͼ10-70�����ڷ����ָ̻�������ǰλ��Լ2s������ECUȡ����һ���ƣ��õ�����FS-��RS-����������ʹִ�����ָ���ԭ���ļ����������͵��ɸնȡ��������������������������������ת������ת���ñ�����ת���ʱ������һ���Ƶ�ʱ���ӳ���
|
|
ͼ10-70 ��������ƣ�ucFl0��
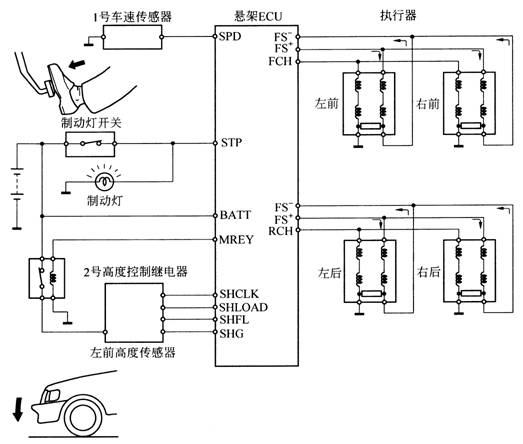
2�������㡱ͷ����
��һ�������ڷ�ֹ�������ƶ�ʱ�����ĵ�ͷ�������١��ƶ��ƿ��غ������߶ȷ����仯ʱ������ECU�õ�������FS+��RS+����������ͨ������ִ�����Ѽ����������͵��ɸն����õ���Ӳ��״̬����ͼ10-71�������ɿ��ƶ�̤��Լ1s����һ���Ʊ�ȡ��������������ECU��FS-��RS-���ӻ�FCH��RCH��������������ִ�����ָ���ԭ���ļ����������͵��ɸնȡ�
|
|
ͼ10-71 �����㡱ͷ���ƣ�ucF10��
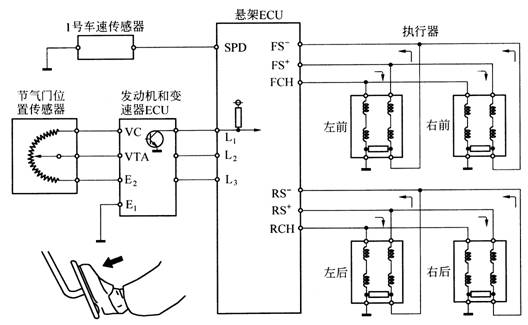
3������������
��һ���ƿ���������ͻȻ����ʱ����������������������ECU�ӳ��ٴ������ͽ�����λ�ô��������������ſ����ʹ��ٶȣ���֪��������ͻȻ����ʱ�����õ�������FS+��RS+����������ʹ����ִ�����Ѽ����������͵��ɸն����õ���Ӳ��״̬����ͼ10-72������һ����Լ��2s����dz��ٴﵽԤ��ֵʱȡ��������ECU�õ�����FS-��RS-��FCH��RCH�����������Ӷ��ָ���ԭ���ļ����������͵��ɸնȡ�
|
|
ͼ10-72 ����������
4���߳��ٿ���
��һ���ƿ�����������ʱ������ʻ�ȶ��Ժ��������ԡ������ٽϸ�ʱ��Լ��140km��h��������ECUʹ��������FCH��RCH�����������������������͵��ɸնȷֱ����õ����С��͡�Ӳ��λ�ã�����������ȶ��ԣ���ͼ10-73���������ٽ���ijһֵ��Լ120km/h������ʱ������ECU�õ�������FS-��RS-����������ʹ����ִ�����ظ���ԭ�������á�
|
|
ͼ10-73 �߳��ٿ���
5����·����
��һ���ƿ����������ڿ�����ƽ��·����ʻʱ���������ס������������Ը��Ƴ����������ԡ���һ���ƿɸ�������ǰ����߶ȵı仯�ֱ��ǰ�ֺͺ��ֵ������С��������ٵ���10km��hʱ�����ٽ�����һ���ƣ���ͼ10-74��������ǰ����ǰ�߶ȴ�������·�治ƽ��ʱ������ECUʹ������FCH��������������������������Ϊ���С������ɸն�����Ϊ��Ӳ��������·��ܲ�ƽ��ʱ������ECU�������������͵��ɸնȾ�����Ϊ��Ӳ���������ܵ����÷�ʽ��ǰ����һ����ֻ���������Һ�߶ȴ����������·���ƽ���̶ȡ�
|
|
ͼ10-74 ��·����
��������������
����1994��10�º����ucF20���ͣ���־LS400�ĵ�ؿ�������ϵͳ�����˰��������ơ����ɶ����ذ�4�����ֵ����ܼ�����������ȷ�ص��ڵ���ѣ�����Ӧ·��IJ�ƽ����������ͬ���ɵ��ɺͼ�������ɣ���ͼ10-75��������ECUͨ�����ٶȴ������߶ȴ����������Ĵ�ֱ�ٶȣ����������Ĵ�ֱ�ٶȣ����������ٶȣ����������ͷǵ�������������ٶȣ���Ȼ����������źŵ����ܿ���ִ���������ṩ��ѵļ������������������߹�һ����·��Ϊ��˵����һ���ơ�����ƹ��̿ɷֳ�����4�����裺
|
|
ͼ10-75 ����������ϵͳ
��1����ʼ���¡�
��ͼ10-76��ʾ�������ֿ�ʼ�������棬ʹ�������ܵ�ѹ�����ҳ��������ƶ�ʱ���������ļ������������٣���ʹ�������������ѳ��������ϡ�
��2������������
��ͼ10-77��ʾ�������ּ���������·��ʱ�������������Ƴ�����ʹ�����������š���ˣ��������ļ��������������Լ��ٳ��������˶���
|
|
|
ͼ10-76 ��ʼ���� ͼ10-77 ��������
��3����ʼ���¡�
��ͼ10-78��ʾ�������ֿ�ʼ������·�棬ʹ���������ţ��ҳ��������˶�ʱ���������ļ������������٣���ʹ����ƽ�����¡�
��4����������
��ͼ10-79��ʾ�������ֽ�һ�����У�ʹ���������ܵ�ѹ��ʱ���������ļ������������ӣ��Լ��ٳ��������˶���
|
|
|
ͼ10-78 ��ʼ���� ͼ10-79 ��������
��ˣ�ͨ������ECU��ָ����������ƹ��ܻ���ݲ�ͬ��������ڼ������ļ�������������������1���ͣ�3���У����ڼ������ļ������������������˶����������ECUʹ���������������ڣ�2���ͣ�4���У����ڼ������ļ������������Ƴ����˶����������ECUʹ��������Ӳ��
������һ��������ʹ�ڲ�ƽ��·�棬����ECUҲ��������4�������϶�����ʵ����Ѽ����������Ŀ��ơ�
���������߶ȿ���
����ucFl0���ͣ����������߶ȿ������Զ��߶ȿ��ơ����ٿ��ƺرյ�ؿ���3�֡������Ľ���ucF20����ǰ���ֿ��ƶ�ȡ���˹رյ�ؿ��ƣ���Ӧ����ucFl0���ͺ��������ڵĸ߶ȿ���ͨ�Ͽ��ر�ȡ����
1���Զ��߶ȿ���
���ܳ��ڳ�Ա������װ��������α仯�������������Զ����Ƴ����߶ȣ�ʹ�䱣�ֺ㶨���ⲻ���ɱ������������벻ƽ·�������Σ��������ڼ��ɵ���Ч���α�������һ����Χ�ڣ��Ӷ�ʹ���������̶ȵ��������������������������������ԡ����⣬����������ʹ����ǰ��ƹ�����̱��ֺ㶨�����������ʻ�İ�ȫ�ԣ��乤��ԭ����ͼ10-80��
|
|
ͼ10-80 �Զ��߶ȿ���
������ECU�������߶ȱ仯ʱ������1�Ÿ߶ȿ��Ƽ̵�����RCMP����������ŷ���ǰ����߶ȿ��Ƶ�ŷ���SLFL��SLFR��SLRL��SLRR��������жϵ�������ͼ10-81�����Ե��������ڵ�ѹ����������ʹ�����߶ȱ��ֺ㶨������ECU���Ƹ����ӵĵ������������10-6��ʾ��
|
|
ͼ10-81 �Զ��߶ȿ���
��10-6 �Զ��߶ȿ���
|
���������ӣ� �����߶� |
2�Ÿ߶ȿ��Ƽ̵�����MREY�� |
1�Ÿ߶ȿ��Ƽ̵�����RCMP�� |
������ŷ���SLEX�� |
ǰ�߶ȿ��Ƶ�ŷ� |
��߶ȿ��Ƶ�ŷ� |
|||
|
������ࣨSLFL�� |
�����ҲࣨSLFR�� |
������ࣨSLRL�� |
�����ҲࣨSLRR�� |
|||||
|
�� �� |
��ǰ |
�� |
�� |
�� |
�� |
�� |
�� |
�� |
|
��ǰ |
�� |
�� |
�� |
�� |
�� |
�� |
�� |
|
|
�����Һ� |
�� |
�� |
�� |
�� |
�� |
�� |
�� |
|
|
���� |
��ǰ |
�� |
�� |
�� |
�� |
�� |
�� |
�� |
|
��ǰ |
�� |
�� |
�� |
�� |
�� |
�� |
�� |
|
|
�����Һ� |
�� |
�� |
�� |
�� |
�� |
�� |
�� |
|
|
�ޱ仯 |
�� |
�� |
�� |
�� |
�� |
�� |
�� |
|
�������磻����������
2���߳��ٿ���
������������ʻʱ���߳��ٿ�������Զ����߶ȣ��Ӷ��������������ʻ���ȶ��ԣ������ٿ��������������ٳ���140km��hʱ����ʹ�߶ȿ��ƿ��������ڡ�HIGH�����ߣ���λ�ã������߶��Իή����NORM�� �����棩λ�ã����DZ����ϵġ�NORM��ָʾ�Ƶ����������ٽ���120km��h����ʱ���߳��ٿ��Ʊ��Զ�ȡ���������ָ���ԭ���߶ȣ���ͼ10-82��ʾ��
|
|
ͼ10-82 �߳��ٿ���
3���رյ�ؿ���
������ͣ�»��Ա��Ҫ�ϡ��³�ʱ��ͨ���رյ�أ����������Զ����ͳ����߶ȣ��Ӷ���������פ�����ƣ������Ա���룬��ͼ10-83��ʾ��
|
|
ͼ10-83 �رյ�ؿ���
�������ڹرյ��Լ3min�����ʹ�á����������һ�����Ŵ�����ECU���ж��������³����ж�������ơ������г��Ŷ��رպ�������������¿�ʼ���ڹرյ��Լ30min�����������������ȡ����
�ġ��������
����ECU���߱�����3��������Ϲ��ܣ������뵽����ECU���źŽ��м��������źż�鹦�ܣ������ܿ���ϵͳ�Ĺ��Ϸ�����ʾ�Ĺ��Ͼ��湦�ܣ��Դ������ʽ��ʾ�������ݵĹ��ϴ�����ʾ���ܡ�
1�������źż�鹦��
��һ���ܿɼ������ת�������ƶ��ƿ��ص�Ԫ�����ź��Ƿ���ȷ�����͵�����ECU�����ӷ��������ڵļ���������Ķ���Ts��E1����ͼ10-84���������̡��ƶ�̤���Ԫ������10-7�Ĺ涨���в�����
|
|
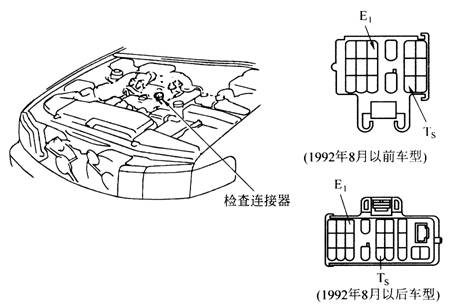
ͼ10-84 ���������
��10-7 �����źż�������
|
�����Ŀ |
����A |
����B |
|
ת���� |
ת����ǰ�� |
ת��Dz�С��36�� |
|
�ƶ��ƿ��� |
λ��OFF���ƶ�̤�岻���£� |
λ�ڡ�ON�����ƶ�̤����£� |
|
�ſصƿ��� |
λ��OFF�����г��Źرգ� |
λ�ڡ�ON���������Ŵ� |
|
������λ�ô����� |
����̤��δ���� |
����̤����1s֮�ڲȵ��� |
|
���ٴ����� |
����<20km/h |
��20km/h |
|
�߶ȿ��ƿ��� |
��NORM��� |
��HIGH��� |
|
LRC����*1 |
��NORM��� |
��SPORT��� |
|
�߶ȿ���ͨ�Ͽ���*2 |
��ON��� |
OFF� |
|
��ǰ���ٴ�����*3 |
|
ʹ�������־�ֹ����������ֱ�˶�������1s |
|
��ǰ���ٴ�����*3 |
|
ʹ�������־�ֹ����������ֱ�˶�������1s |
|
�Һ���ٴ�����*3 |
|
ʹ�������־�ֹ����������ֱ�˶�������1s |
*1������ucF10����
*2������1989��12��~1992��8�µ�ucF10����
*3������ucF20����
����1992��8����ǰ����־LS400�������źż��Ľ�����DZ����ϵij����߶�ָʾ�ơ�NORM����ʾ���������ź�������������A����NORM��ָʾ��ÿ0.5s��˸һ�Σ�������B����õƳ�����������ͼ10-85���������ʾ�����ź��й��ϡ�����1992��8���Ժ����־LS400�������źż��Ľ�������DZ����ϵij����߶�ָʾ�ơ�HI��ֱ���Դ������ʽ��˸��������ͼ10-86���� 1992��8���Ժ��ucFl0���ͺ�1994��10���Ժ��ucF20�����ϴ���ĺ���������ͬ�����ֳ��͵Ĺ��ϴ������10-8�ͱ�10-9��
|
|
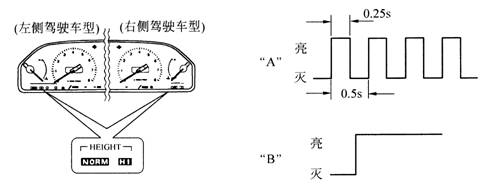
ͼ10-85 �����źż������1992��8����ǰ���ͣ�
|
|
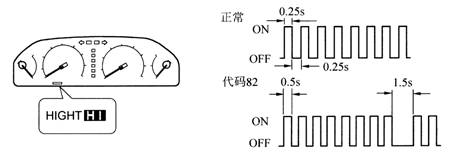
ͼ10-86 �����źż������1992��8���Ժ�
��10-8 �����źż����ϴ������ucF10��
|
������ |
ϵͳ |
��˸ģʽ |
��� |
|
82 |
ת������· |
|
������ת���36�����ϵ��ź� |
|
83 |
�ƶ��ƿ��ص�· |
|
�ƶ��ƿ����źŲ��仯 |
|
84 |
�ſصƿ��ص�· |
|
�ſصƿ����źŲ��仯 |
|
85 |
������λ���źŵ�· |
|
�����������λ���ź� |
|
91 |
���ٴ�������· |
|
�����복�ٸ���20km/h���ź� |
|
92 |
�߶ȿ��ƿ��ص�· |
|
�߶ȿ��ƿ����źŲ��仯 |
|
93 |
LRC���ص�· |
|
LRC�����źŲ��仯 |
��10-9 �����źż����ϴ������ucF20��
|
������ |
ϵͳ |
��˸ģʽ |
��� |
|
81 |
ת������· |
|
ת��Ǵ���36����źŲ����� |
|
82 |
�ƶ��ƿ��ص�· |
|
�ƶ��ƿ����źŲ��ı� |
|
83 |
�ſصƿ��ص�· |
|
�ſصƿ����źŲ��ı� |
|
84 |
������λ���źŵ�· |
|
������λ���ź�δ��� |
|
85 |
���ٴ�������· |
|
�����복��20km/h���ź� |
|
86 |
�߶ȿ��ƿ��ص�· |
|
�߶ȿ��ƿ����źŲ��ı� |
|
91 |
��ǰ���ٶȴ�������· |
|
ʹ�������־�ֹ����������ֱ�˶�������1s |
|
92 |
��ǰ���ٶȴ�������· |
|
|
|
93 |
����ٶȴ�������· |
|
���⣬��1992��8����ǰ�ij��ͣ��ڽ��������źż��ʱ�����ܿ���ϵͳ�ļ������͵��ɸնȶ��̶��ڡ�Ӳ��λ�ã������߶ȿ�������������У�������1992��8���Ժ�ij��ͣ����������������ɸնȺͳ����߶ȿ��ƾ����������С����رյ�أ��ѿ�����������Ķ���Ts��E1�������˳������źż��״̬��
2�����Ͼ��湦��
�������ܿ���ϵͳ���ֹ���ʱ������ECU�ἰʱ�ضԹ��Ͻ��м�⣬��ͨ����˸���Ͼ�����������ʻԱ�����Ͼ���ƾ��dz����߶�ָʾ�ƣ�1992��8����ǰ�ǡ�NORM����1992��8���Ժ��ǡ�HI������ͼ10-85��ͼ10-86������������ECU�������ֹ���ʱ������Ͼ����Ϩ��
3�����ϴ�����ʾ����
������ECU������ʱ������ѹ����Դ������ʽ�����ڴ����������ͨ��ز����Ӽ����������TDCL�ϵ�TC��E1����ʱ�����ϴ���ͻ���ʾ��������ͼ10-87���������Ͼ���ƾ��ȵ�ÿ0.5s��˸һ�Σ���Ϊ�������룬��ʾϵͳ�����������Ͼ������˸�����ȣ����ʾ�й��ϣ���ͼ10-87������ͼ��ʾ���ϴ���12��31�����������������Ĺ���ͬʱ����������С�Ĺ��ϴ�������ʾ�����ϴ�������������10-10��
|
|
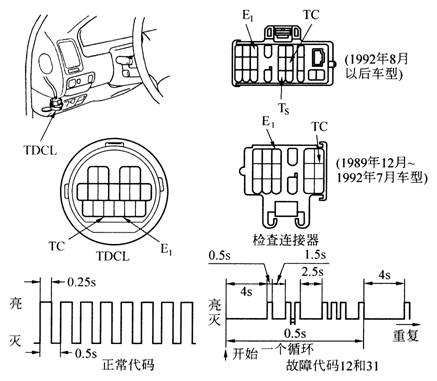
ͼ10-87 TDCL�ͼ�������������ϴ���
��10-10 ���ϴ���һ����
|
������ |
��� |
���ϲ�λ |
����*1 |
�洢*2 |
���� |
|
11 |
��ǰ�߶ȴ�������· |
������ECU�߶ȴ�����֮������������� ���߶ȴ����� ������ECU |
�� |
�� |
���� |
|
12 |
��ǰ�߶ȴ�������· |
�� |
�� |
||
|
13 |
�Һ�߶ȴ�������· |
�� |
�� |
||
|
14 |
���߶ȴ�������· |
�� |
�� |
||
|
15 |
��ǰ���ٶȴ�������· |
������ECU�ͼ��ٶȴ�����֮������������� �����ٶȴ����� ������ECU |
�� |
�� |
ucF20 |
|
16 |
��ǰ���ٶȴ�������· |
�� |
�� |
||
|
17 |
����ٶȴ�������· |
�� |
�� |
||
|
21 |
ǰ���ܿ���ִ������· |
������ECU�����ܿ���ִ����֮������������� �����ܿ���ִ���� ������ECU |
�� |
�� |
ucF10 |
|
��ǰ���ܿ���ִ������· |
�� |
�� |
ucF20 |
||
|
22 |
�����ܿ���ִ������· |
�� |
�� |
ucF10 |
|
|
��ǰ���ܿ���ִ������· |
�� |
�� |
ucF20 |
||
|
23 |
�Һ����ܿ���ִ������· |
�� |
�� |
ucF20 |
|
|
24 |
������ܿ���ִ������· |
�� |
�� |
ucF20 |
|
|
31 |
ǰ�߶ȿ��Ƶ�ŷ���· |
������ECU��߶ȿ��Ƶ�ŷ�֮������������� ���߶ȿ��Ƶ�ŷ� ������ECU |
�� |
�� |
ucF10 |
|
��ǰ�߶ȿ��Ƶ�ŷ���· |
�� |
�� |
ucF20 |
||
|
32 |
��ǰ�߶ȿ��Ƶ�ŷ���· |
�� |
�� |
ucF20 |
|
|
33 |
�Һ�߶ȿ��Ƶ�ŷ���· |
�� |
�� |
���� |
|
|
34 |
���߶ȿ��Ƶ�ŷ���· |
�� |
�� |
���� |
|
|
35 |
������ŷ���· |
������ECU��������ŷ�֮������������� ��������ŷ� ������ECU |
�� |
�� |
���� |
|
41 |
1�Ÿ߶ȿ��Ƽ̵�����· |
������ECU�ͼ̵���֮������������� ���̵��� ������ECU |
�� |
�� |
ucF10 |
|
�������̵ܼ�����· |
ucF20 |
||||
|
42 |
ѹ���������· |
������ECU��ѹ�������֮������������� ��ѹ������� ������ECU |
�� |
�� |
���� |
|
51*3 |
��1�Ÿ߶ȿ��Ƽ̵����ij������� |
��ѹ������� ��ѹ���� ������ ���߶ȿ��Ƶ�ŷ� ��������ŷ� ���߶ȴ��������Ƹ� ���߶ȴ����� ����ѹ�� ������ECU |
�� |
�� |
ucF10 |
|
���������̵ܼ����ij������� |
�� |
�� |
ucF20 |
||
|
52*4 |
��������ŷ��ij������� |
���߶ȿ��Ƶ�ŷ� ��������ŷ� ������ ���߶ȴ��������Ƹ� ���߶ȴ����� ������ECU |
�� |
�� |
���� |
|
61 |
���ܿ����ź� |
����ECUʧ�� |
�� |
�� |
ucF10��1992��7����ǰ�� |
|
71*5 |
�߶ȿ���ͨ���Ͽ��ص�· |
������ECU��߶ȿ���ͨ�Ͽ���֮������������� ���߶ȿ���ͨ�Ͽ��� ������ECU |
�� |
�� |
ucF10 |
|
72 |
���ܿ���ִ������Դ��· |
��AIR SUS����˿ ������ECU�뷢�������̵���֮������������� ������ECU |
�� |
�� |
ucF10 |
|
73*6 |
�����IC��������·���������·�� |
������ECU�뷢���IC������֮������������� ������ECU |
�� |
�� |
1992��8���Ժ��ucF10��ucF20 |
|
74 |
�����߶ȿ��Ƶ�Դ��· |
������ECU������֮������������� ��PWR-IG����˿ ��AIR SUS����˿ �����̵��� �������������� ������ ������ECU |
�� |
�� |
1992��8���Ժ��ucF10 |
|
��Դ��· |
�� |
�� |
ucF20 |
||
|
75 |
�߶ȴ�������· |
������ͣ���ڲ�ƽ·�棨������ ���߶ȴ��������Ƹ� ���߶ȴ����� ������ECU |
�� |
�� |
1992��8���Ժ��ucF10��ucF20 |
ע*1�������桱����ע�б�ǡ��𡱣���ʾ���Ͼ����ÿ����˸һ�Σ�ע�б�ǡ���������ʾ����Ʋ���˸��
*2�����洢������ע�б�ǡ��𡱣���ʾ��ʹ�Ͽ���أ�������Ҳ�����ڴ������У���ǡ�������ʾ�����档
*3������ѹ���������ͷ�ѹ��Ϊ980kPa���糵���������¡����ػ�����תʱ��ǧ�ﶥ���������£���ͼ���г����߶ȿ��ƣ������߶ȿ��ƹ��ܿ��ܻ���ʱʧЧ�����������51�����루�Ⲣ�Dz������������ǣ�����������£�����ؽ�ͨԼ70min�����߶ȿ��ƹ��ܼ��ɻָ���
*4�����ж���ֻ���ǧ�ﶥ������ʱ�����г����߶ȿ��ƣ����п������52�����롣�Ⲣ�Dz�����������52���������ʱ������δִ�г����߶ȿ��ƹ��ܡ�����������£�ֻҪ������ȶϿ�Ȼ���ٽ�ͨ����ֹͣ��ж���ֻ���³������߶ȿ��ƹ��ܼ��ɻָ���
*5������1992��8����ǰ��ucFl0���ͣ����߶ȿ���ͨ�Ͽ����ڡ�OFF��λ��ʱ�������71�����롣
*6������1992��8���Ժ��ucFl0��ucF20���ͣ�������δ��תʱ�����73�����롣
����������ECU�еĹ��ϴ��룬��ʹ�ڹرյ�غ�Ҳ�ܱ������������ϴ�������������泵����ݵIJ�ͬ��������ͬ��
��1��ucFl0���ͣ�1989��12�¡�1994��9�£���
�������ַ�������������ϴ��룺
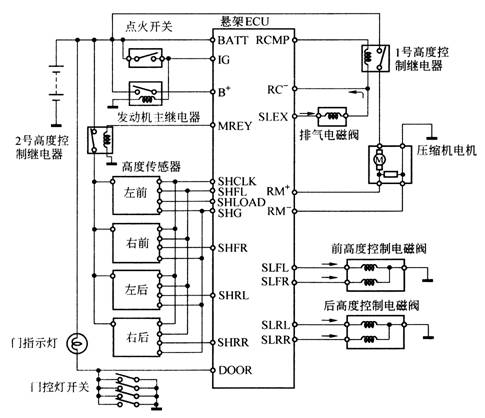
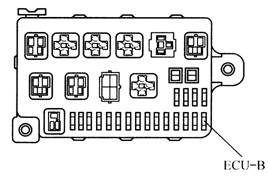
1���رյ�أ���λ�ڼ�ʻ����1�Ž��ߺ��ϵ�ECU-B����˿����10s���ϣ���ͼ10-88����
|
|
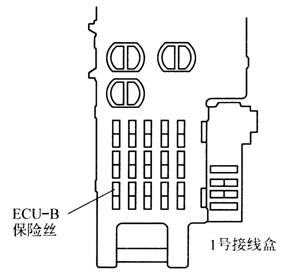
ͼ10-88 ������ϴ���
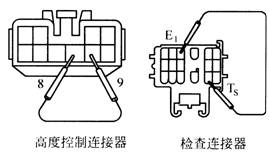
2������1989��12�¡�1992��7�µ�ucFl0���ͣ��رյ�أ����Ӹ߶ȿ�����������8��9���ӣ���ͬʱ���Ӽ����������Ts��E1���ӣ���ͼ10-89�����ٽ�ͨ��أ�10s���ڵ����Ȼ��ͨ��������ѿ��߶ȿ�����������8��9���Ӽ������������Ts��E1���ӡ���1992��8�¡�1994��9�µ�ucFl0���ͣ�����������Ts��E1�⣬������������ͬ��
��2��ucF20���ͣ�1994��10�¡�1997��7�£���
������ϴ���ķ���Ҳ���������֣�
1���رյ�أ���λ�ڼ�ʻ����1�Ž��ߺ��ϵ�ECU-B����˿����30s���ϣ���ͼ10-90����
|
|
|
ͼ10-89 ������ϴ��� ͼ10-90 ������ϴ���
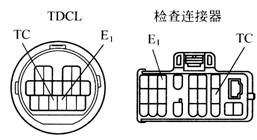
2����ͨ��أ�����TDCL�����������ϵ�TC��E1���ӣ�Ȼ����8s�ڿ����س���3�Σ���ͼ10-91����
|
|
ͼ10-91 ������ϴ���
��3��ucF20���ͣ�1997��8���Ժ�
������ϴ���ķ���ֻ��һ�֣���ͨ��أ����Ӽ���������ϵ�TC��E1���ӣ�Ȼ����3s֮�ڲ��ƶ�̤��8�λ����ϡ���Ҫע����ǣ����ַ���ͬʱ���ABS��TRC��VSC�Ĺ��ϴ���һ���������
����� ������Ϸ���
������Ϸ�������־LS400��ucF20����Ϊ�����С�
һ��������Ϸ�������
1����ϳ���ͼ10-92��
�������ܿ���ϵͳ������ϼ���ͼ��
����ģ�� ȷ�Ϲ�������
������
![]()
![]()
![]()
![]()
![]() �������
�������
�ټ����ϴ���
![]()
![]()
![]() ��������
��������
���ϴ���
���ϴ���һ���� �������
����
![]()
![]() ����
����
![]()
![]()
![]() ��������
��������
ͼ10-92 �������ܿ���ϵͳ������Ͽ�ͼ
2�����ϴ����·���һ��������10-11��
����������ϳ����ڡ��ټ����ϴ��롱�����У�����ʾ���ϴ��룬��10-11���Ըù��ϴ����������ĵ�·��Ԫ�����м�顣
��10-11 ���ϴ������·һ����
|
���ϴ��� |
����· |
|
11��12��13��14 |
�߶ȴ�������· |
|
15��16��17 |
���ٶȴ�������· |
|
21��22��23��24 |
���ܿ���ִ������· |
|
31��32��33��34��35 |
�߶ȿ��Ƶ�ŷ���������ŷ���· |
|
41 |
�������̵ܼ�����· |
|
42 |
ѹ���������· |
|
51 |
��ɵ������������������̵ܼ����Ĺ��� |
|
52 |
��ɵ�����������������ŷ��Ĺ��� |
|
73 |
�����IC��������· |
|
74 |
��Դ��· |
|
75 |
�߶ȴ�������· |
3�������źŹ��ϴ������·һ����
����������ϳ����ڡ������źż�顱�����У�����ʾ���ϴ��룬��10-12���Ըù��ϴ����������ĵ�·��Ԫ�����м�顣
��10-12 �����źŹ��ϴ������·һ����
|
������ |
����· |
������ |
����· |
|
81 |
ת������· |
86 |
�߶ȿ��ƿ��ص�· |
|
82 |
ͣ���ƿ��ص�· |
91 |
��ǰ���ٶȴ�������· |
|
83 |
�ſصƿ��ص�· |
92 |
��ǰ���ٶȴ�������· |
|
84 |
������λ�ô�������· |
93 |
����ٶȴ�������· |
|
85 |
���ٴ�������· |
|
|
4�����������
������ϳ�������ϴ���ʱ��������������������Ȼ���ڣ���Ӧ����10-13�е�˳��ÿһ������������й����ų����������������Ӧ�ĵ�·��